| Tâches Image | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
| Informations | ||
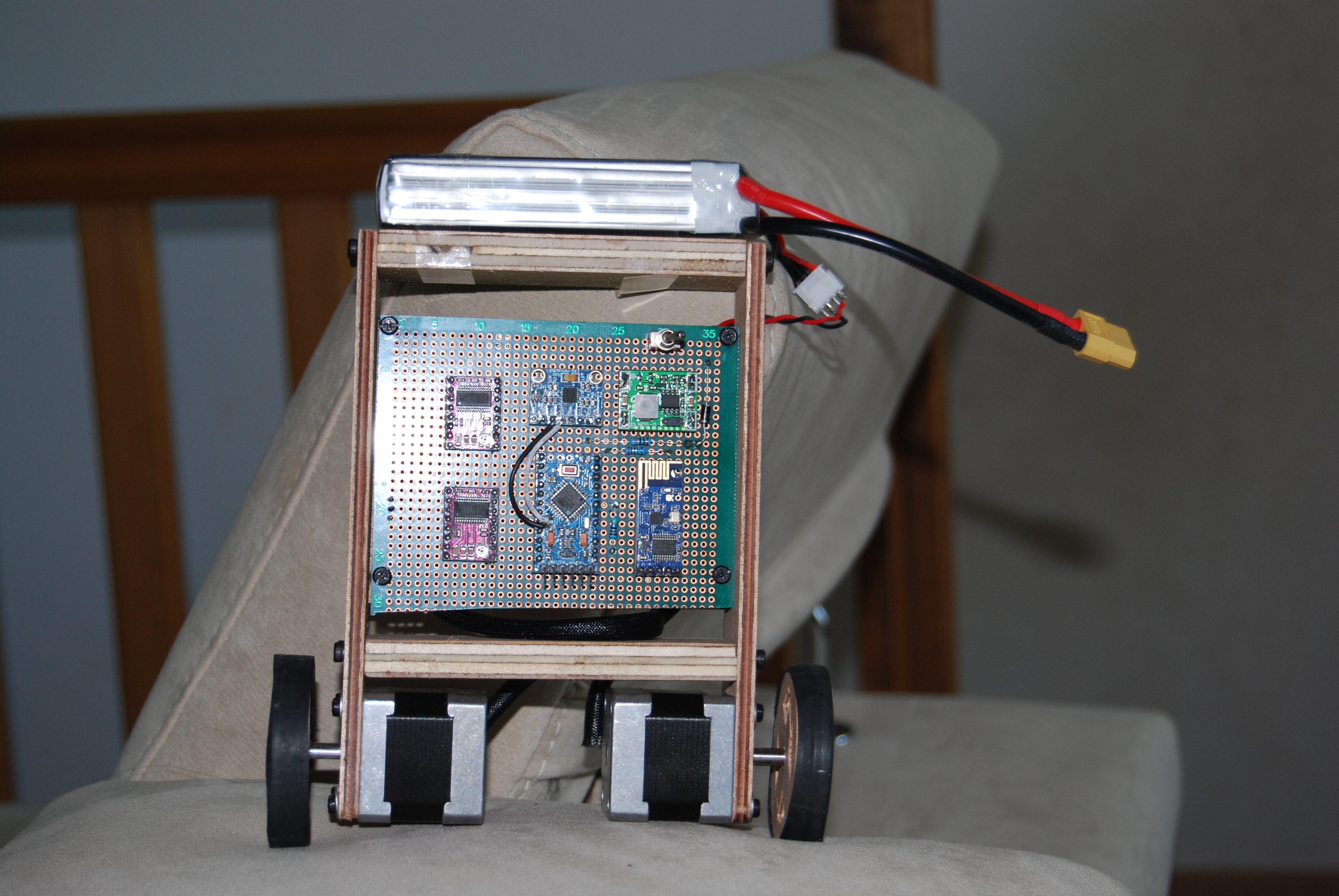
| 06 Robot monté | ||
| Type : JPEG | ||
| Résolution : 3872 x 2592 | ||
| Taille fichier : 2713 Ko | ||
| Prise le : 21 Juin 2018 | ||
| Appareil Photo : NIKON D60 | ||
| Vues : 1019 | ||
|
|
||
| Me contacter | ||
|
|
||
|
|
||
Il me reste à refaire la télécommande car le programme de balancing ne démarre pas sans la commande à distance.
En tout cas, il s'allume bien avec la batterie LIPO, l'Arduino monitor bien la tension et mesure bien le gyroscope à 250Hz (250 fois par seconde).